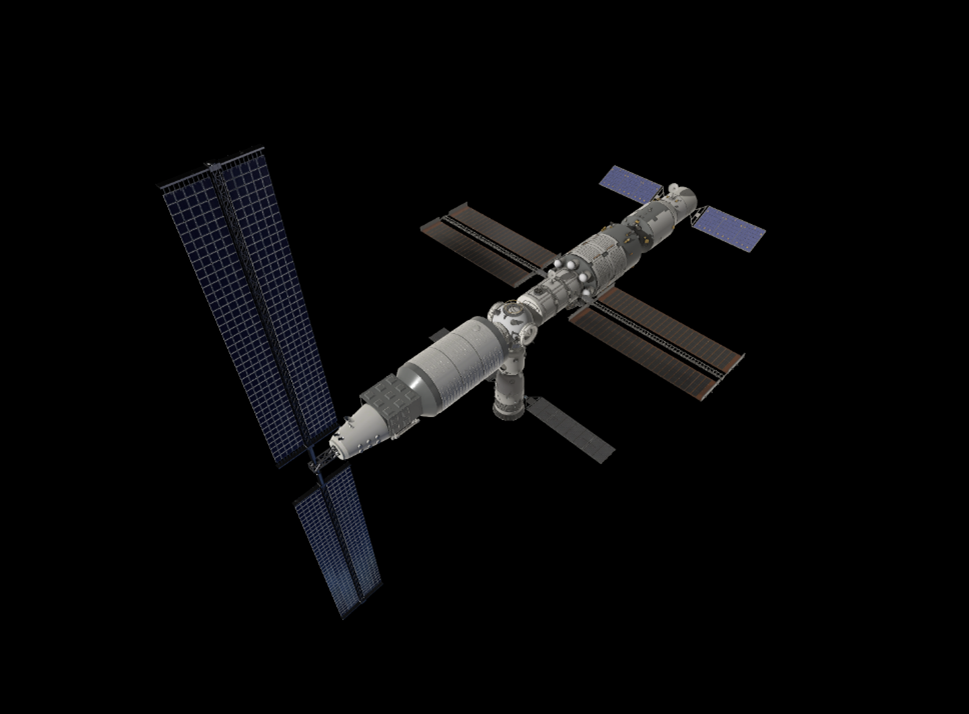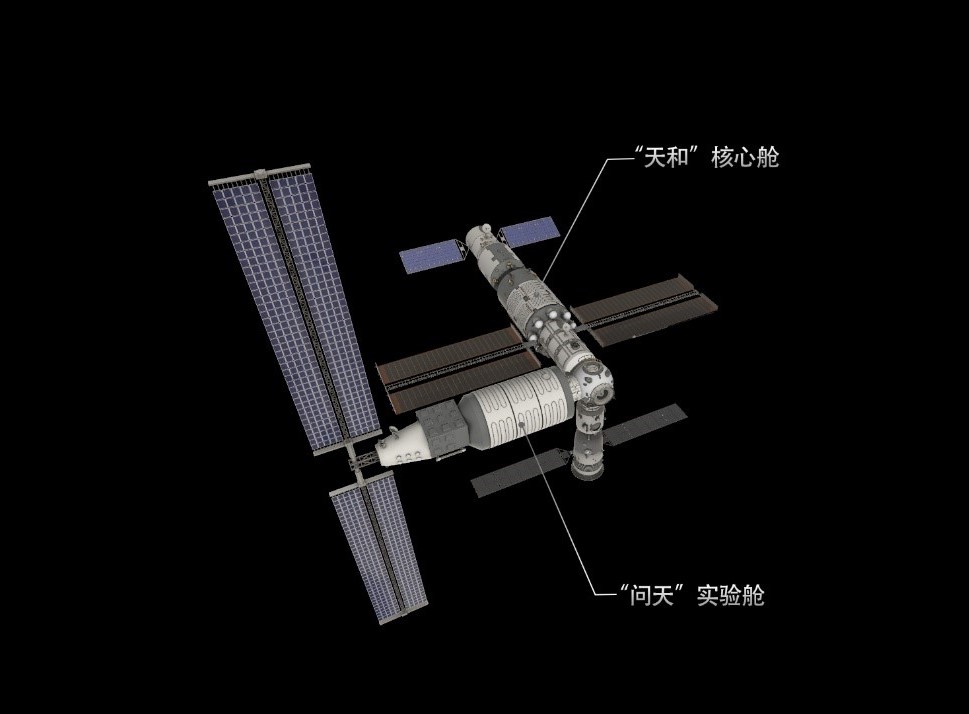





2022年7月25日,我国空间站完成了第二个本体舱段在轨部署任务的第一步,即问天实验舱成功发射入轨并与天和核心舱节点舱的前向对接口完成对接,形成“一”字形组合体,其中位于核心舱后向对接口的是天舟四号货运飞船,位于径向对接口的是神舟十四号载人飞船。

空间站“一”字形组合体(图片来源:爱太空)
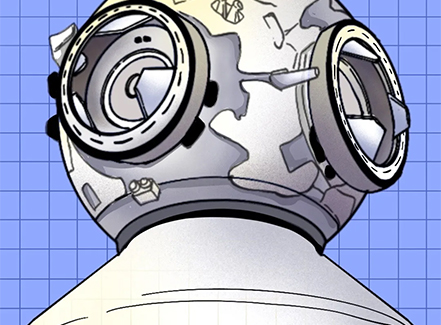
核心舱有三个对接口,两个靠泊口共五个口,其中四个位于核心舱前端(前后取决于空间站的飞行方向)的节点舱,即前(前向)对接口、下(径向)对接口、左(II象限)靠泊口、右(VI象限)靠泊口,核心舱后端有一个对接口,即后向口。II象限、VI象限靠泊口不具备直接对接的条件,这就是被称为靠泊口,而不是对接口的原因。
为什么不直接与II象限、VI象限口对接呢?那是因为,若问天实验舱与节点舱的II象限或VI象限口直接对接,需要从轨道面以外的方向接近空间站,使得对接控制过程更加复杂,不同于8吨级的神舟飞船,20吨级的问天实验舱在接近过程中向前飞行的速度,对于核心舱来说是在单侧的一个非常大的向左或向右的力,会给核心舱带来极大的姿态偏航,而修正这个姿态偏离会使核心舱付出很大的代价,如消耗很多推进剂。而转位时两舱是在相对速度极低的状态下开展,能在很大程度上降低该风险。
那为什么要转位呢?问天实验舱一直停在节点舱前向口可以吗?不可以,同样地,空间站本体的第三个舱段梦天实验舱未来也将与核心舱的前向对接口对接,显然 问天实验舱要在此之前让位,即从前向口挪到VI象限停泊口。这个过程就被称之为“转位”。
其实,早在2022年1月6日,天舟二号货运飞船已经和空间站一起开展了机械臂转位试验,机械臂捕获天舟二号后,天舟二号与核心舱解锁分离,之后天舟二号在机械臂拖动下以节点舱球心为圆心进行平面转位,而后反向操作,天舟二号与核心舱重新对接并完成锁紧,转位试验结束。试验初步检验了利用机械臂操作空间站舱段转位的可行性和有效性,验证了空间站舱段转位技术和机械臂大负载操控技术[1]。

空间站机械臂转位货运飞船试验示意图(图片来源:中国载人航天官网)
但问天实验舱重量约为天舟二号的1.5~3倍,而且天舟二号转位时使用的是核心舱的大机械臂,所以力学环境与问天实验舱转位时会有所不同,此外,问天实验舱转位的旋转过程也更加复杂。因此,本次转位任务在未被完整验证的情况下开展,充满挑战。
在正常情况下,问天实验舱转位并不采用核心舱的大机械臂,而是采用转位机构,某种意义上来说,转位机构也是一种机械臂。转位机构的转臂(机械臂)安装在问天实验舱对接面附近,支座安装在核心舱节点舱两侧,二者通过锥形捕获机构连接。

对接转位机构(图片来源:论文《对接转位机构末端抓手装置的创新设计》)

对接转位机构布局(图片来源:论文《对接转位机构末端抓手装置的创新设计》)
转位前需要完成准备工作有两个步骤:首先位于问天实验舱的转位机构机械臂旋转并捕获核心舱上的支座,锁紧完成后两者建立刚性连接;第二步问天实验舱对接机构与核心舱节点舱前向口的对接机构解锁,实现两舱分离。
整个转位过程由位于问天实验舱的转位机构机械臂,以及位于核心舱节点舱的旋转支座共同完成,一共需要三次旋转。第一次:转位机构机械臂绕其根部向上旋转,带动问天实验舱转动至节点舱前向口斜上方;第二次:旋转支座绕其中心转动,带动问天实验舱转动至节点舱VI象限停泊口斜上方;第三次:转位机构机械臂绕其根部向下旋转,带动问天实验舱转动至VI象限停泊口附近。在确认位置误差满足要求后,问天实验舱对接机构推出,与节点舱VI象限停泊口完成对接并锁紧。之后,转位机构机械臂与旋转支座解锁、分离后复位。
问天实验舱转位对接任务完成后,转位机构也就完成了自己的历史使命。
参考文献:
1. 空间站机械臂转位货运飞船试验取得圆满成功. 中国载人航天工程官网
2. 陈宝东 柏合民 肖杰 赵金才. 对接转位机构末端抓手装置的创新设计. 机械传动. 工程科技Ⅱ辑
责任编辑:王鹏鹏


京ICP备11000850号-1 ![]() 京公网安备11010502039775号
信息网络传播视听节目许可证0111611号
国家科技基础条件平台
京公网安备11010502039775号
信息网络传播视听节目许可证0111611号
国家科技基础条件平台
© 2011- 版权所有:中国数字科技馆 未经书面许可任何人不得复制或镜像